研究テーマ
*

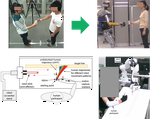



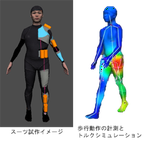




様々なセンシング技術を通じて得た人間の情報を元に人間のモデルを構築し、その知識に基づいて賢く動作するロボットを実現することにより、人とロボットが共に活動する未来社会について研究を行っています。主な研究テーマは大きく分けて、カメラその他のセンサを用いて人の体や動きを測る、得られたデータを元に人間の運動モデルや心理モデルを構築する、人や環境に合わせてロボットの動作を最適化する、ロボット評価のために人とロボットのインタラクション実験をデザインする、などで構成されます。配属先ではフランス国立科学研究センター(CNRS)とともに設立された国際研究ラボや人・機械協調AI研究拠点において第一線の研究者や留学生等と切磋琢磨して、ロボティクスの先端研究課題に取り組みます。