人の作業動作認識
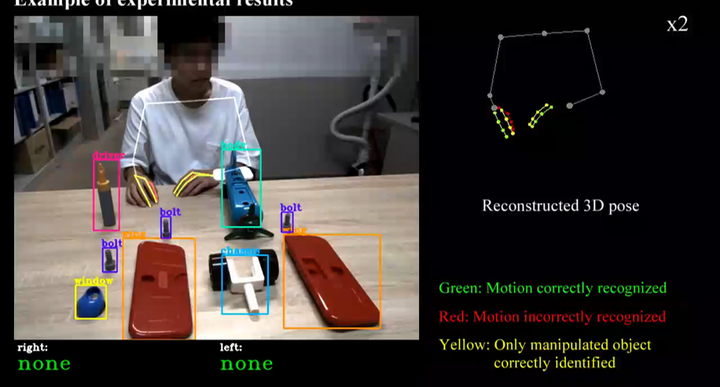
ロボットの行動計画や動作学習を容易にするために、人が作業を行っている状態を観察し、その動作をデータベース化することは有用である。 しかし、人がどんな物体を持ち、それをどう操作しているのか?それらを全て人手で指定していくことは非常に手間が大きい。 そこで、作業を行っている動画から、操作物体の認識、動作の切れ目の判別、分割された動作内容の認識を実現する手法を開発している。 複雑な手作業も扱うことができるように、非装着型のシステムを構築している。
(大阪大学 原田研究室との共同研究)