協働作業時の人の感覚の理解
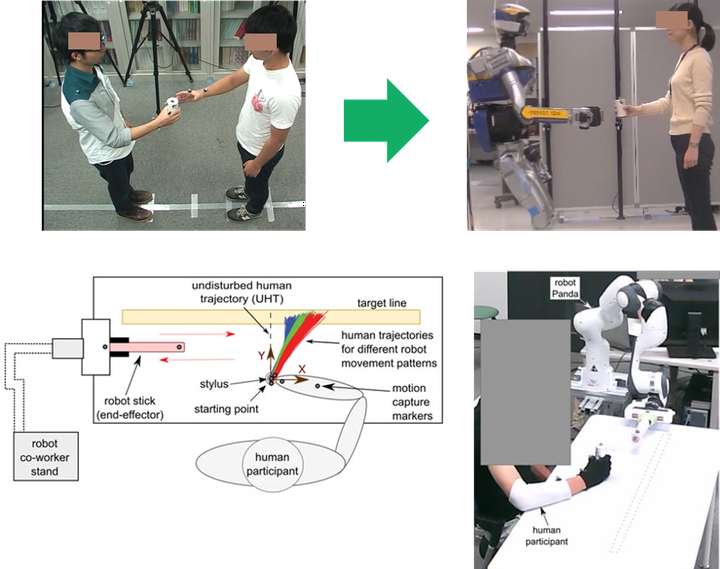
人間とロボットが作業空間を共有して働く状況をより良いものにするために、人間は協働相手のどのような要素に対して安心感や心地よさを感じるのかについて研究している。 これまで、手渡し作業において、相手の身体的・社会的特徴が心地よいものの手渡し位置に影響を与えることや、 ロボットと人間が近くで働いている場合、ロボットの動作の不確かさは協働作業者に不快感を与えることを、被験者実験から示している。
人間とロボットが作業空間を共有して働く状況をより良いものにするために、人間は協働相手のどのような要素に対して安心感や心地よさを感じるのかについて研究している。 これまで、手渡し作業において、相手の身体的・社会的特徴が心地よいものの手渡し位置に影響を与えることや、 ロボットと人間が近くで働いている場合、ロボットの動作の不確かさは協働作業者に不快感を与えることを、被験者実験から示している。